
Kamis, 12 Juli 2012
RANGkaian charge pembangkit listrik tenaga surya
http://kumpulanrangkaianelektronik.blogspot.com/2012/04/rangkaian-pembangkit-listrik-tenaga.html
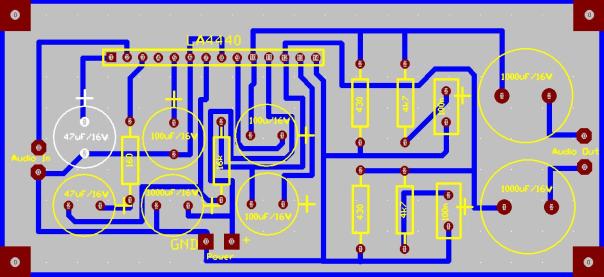
1. Rangkaian power amplifier dengan IC LA 4440.
Seingat saya sudah ada yang jual dalam bentuk KIT, tapi tentu saja lebih menarik jika kita membuat sendiri papan PCBnya. rangkaian ini dapat digunakan untuk membuat speaker aktif. Silakan untuk memodifikasi dengan menambahkan tone control dan volume control sendiri.
Ampifier ini adalah amplifier mono (tunggal) untuk membuat menjadi stereo tentu saja anda harus membuat 2 buah. Berikut layout PCB untuk rangkaian amplifier ini. Silakan sesuaikan dengan ukuran komponen yang digunakan.
2. Rangkaian saklar cahaya

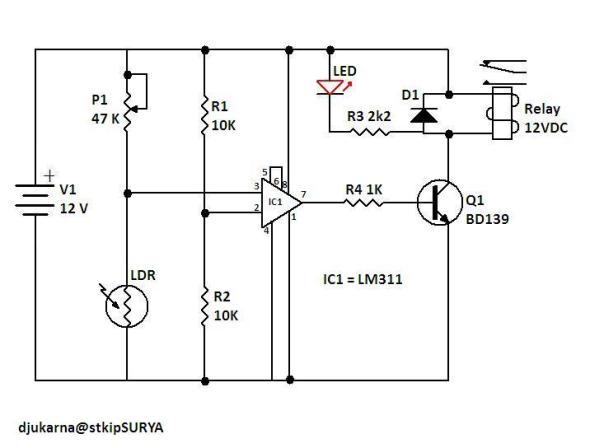



 Rangkaian ini adalah sebuah saklar cahaya. Relay akan OFF bila ada cahaya dan akan ON bila tidak ada cahaya. Rangkaian saklar cahaya ini bisa digunakan untuk membuat lampu taman atau lampu luar rumah otomatis, jadi kita tidak perlu repot-repot mematikan dan menyalakan lampu taman atau lampu luar rumah setiap pagi dan sore hari.
potensiometer1 digunakan untuk mengatur sensitivitas LDR. Berikut layout PCB untuk rangkaian di atas.
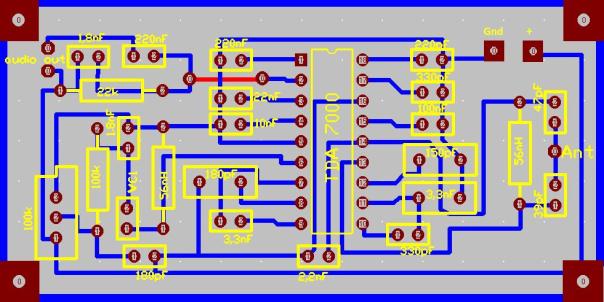
3. Rangkaian Radio FM sederhana
Sekarang radio sudah menjadi hal yang umum, hampir semua HP dilengkapi dengan FM radio. Namun tidak ada salahnya jika anda tertarik untuk membuat sendiri rangkaian FM radio sederhana. Rangkaian radio ini tidak dilengkapi dengan power amplifier sehingga untuk mendengarkan suaranya masih harus menggunakan headset. Untuk mengunakan speaker yang lebih besar, Rangkaian bisa dihubungkan ke rangkaian amplifier pada no 1.
Berikut layout PCB untuk rangkaian FM radio di atas
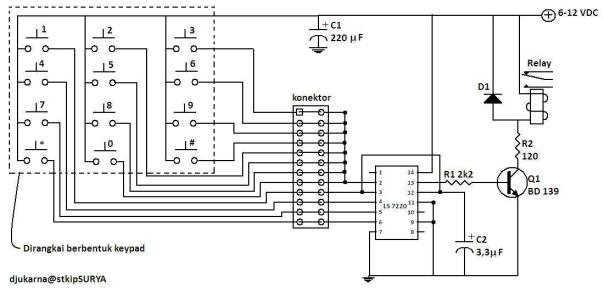
4. Rangkaian kunci kombinasi digital
Rangkaian ini adalah sebuah rangkaian kunci kombinasi digital sederhana. Rangkaian kunci kombinasi digital dapat dipasang pada peralatan elektronika atau pada mekanisme kunci rumah. Untuk memasang pada mekanisme kunci rumah anda dapat memodifikasinya sendiri. Kombinasi angkanya dapat diatur dengan mengubah koneksi pada konektor.
Berikut layout PCB untuk rangkaian kunci kombinasi di atas
5. Rangkaian untuk robot line follower
Membuat robot line follower (dapat mengikuti garis) sangat mudah, tidak perlu menggunakan mikrokontroller. berikut ini rangkaian sederhana untuk robot line-follower.
motor kiri dihubungkan ke roda kiri dan motor kanan dihubungkan ke roda kanan. Robot ini menggunakan sensor cahaya LDR dan sumber cahaya dari lampu LED putih. Potensiometer 1 dan 2 digunakan untuk mengatur sensitivitas LDR. Bentuk robotnya, silakan anda berkreasi sendiri, Untuk membuat robot sederhana yang murah dapat menggunakan motor listrik kecil milik mainan mobilan TAMIYA.
Berikut layout PCB untuk rangkaian di atas
Ok, selamat mencoba dan ditunggu koreksinya.
Ditulis dalam Elektronika
4 Komentar
Kaitkata: elektronika dasar, komponen elektronika, lampu taman, power amplifier, rangkaian amplifier, rangkaian elektronika
Praktikum membuat running LED
Apr 23
Posted by djukarna
“OK selamat bertemu kembali, berikut ini saya mau membagikan sedikit panduan praktikum elektronika dasar ” membuat running LED” yang merupakan bagian dari diktat praktikum yang sedang saya buat. Silakan bagi yang mau mencoba, memperbanyak, memperbaiki dalam bentuk hardcopy , hanya jangan dipublikasi ulang dalam bentuk softcopy atau media dunia maya lainnya.”
1. Tujuan Praktikum
Tujuan praktikum ini adalah membuat rangkaian running LED dengan menggunakan IC NE555 sebagai sumber clock dan IC logika CD4017 sebagai divide counter
2. Dasar teori
Pada praktikum ini kita akan membuat sebuah rangkaian sederhana yang bersifat dekorasi yaitu running LED 10. Rangkaian ini terdiri dari 2 bagian yaitu bagian sumber denyut (clock) dan bagian logika. Untuk membuat sumber clock kita menggunakan IC NE 555 yang sudah sangat terkenal. IC NE 555 ini akan dikonfigurasikan menjadi sebuah generator denyut yang membangkitkan gelombang kotak. Berikut rangkaian NE 555 sebagai pembangkit denyut gelombang kotak.
Gambar 1 rangkaian NE555 yang digunakan sebagai pembangkit denyut
Denyut (clock) yang keluar dari IC NE 555 dibaca oleh IC 4017. IC 4017 adalah IC counter-divider dengan 10 titik output. Setiap perubahan dari low ke high pada clock yang diberikan oleh NE 555 ke kaki clock IC 4017 akan menyebabkan IC 4017 menghitung dari satu titik output ke titik output berikutnya. Jika proses menghitung sudah sampai pada titik output terakhir (9) maka proses menghitung akan diulang dari awal. Frekuensi clock NE 555 dapat dihitung dengan rumus :
Berikut ini rangkaian CD4017 yang dihubungkan ke 10 buah LED.
Gambar 2 Rangkaian CD 4017 sebagai counter divider
Untuk output IC 4017 ini dihubungkan dengan 10 buah lampu LED. Lampu LED ini membutuhkan arus listrik maksimal 20 mA. Untuk mencegah arus yang berlebih maka sebuah resistor dengan nilai 1 kiloOhm dihubungkan ke kaki negatif LED.
R3 adalah potensiometer yang dapat digunakan untuk mengubah nilai clock, sehingga kecepatan running LED dapat diatur dengan mengubah-ngubah nilai potensiometer ini.
3. Skema dan Komponen yang dibutuhkan
Praktikum ini akan membuat sebuah running Led 10 lampu dengan menggunakan IC NE 555 sebagai clock dan CD 4017 sebagai counter divider. Berikut rangkaian elektronika yang akan dibuat.
Gambar 3 rangkaian running led 10
Komponen-komponen yang dibutuhkan adalah :
IC CD 4017 = 1 buah
IC NE 555 = 1 buah
Resistor 1kOhm = 2 buah
Resistor 4k7 = 1 buah
Capasitor 100nF = 2 buah
Capasitor 10mF/16V = 1 buah
Potensiometer 100K = 1 buah
LED 5 mm = 10 buah
PCD 8cm x 8cm = 1 lembar
Kabel = secukupnya
Soket IC 2 x 4 kaki = 1 buah
Soket IC 2 x 8 kaki = 1 buah
Alat-alat kerja yang dibutuhkan :
Solder listrik 30 Watt = 1 buah
Tang potong = 1 buah
Tang lancip = 1 buah
Tang pengupas kabel = 1 buah
Obeng + dan - = 1 set
Sedotan timah = 1 buah
Ferrid clorida = secukupnya
Wadah ferrid clorida = 1 buah
Bor pcd = 1 set
Spon gosok = 1 set
Tinner = secukupnya
Dudukan solder = 1 set
4. Cara kerja
Proses pembuatan PCB
Perhatikan skala pada gambar 5. Gambar ini belum sesuai dengan skala sebenarnya, jadi sesuaikan sendiri dengan ukuran komponen yang digunakan.
Gambar 5 layout PCB yang akan dicetak
Pindahkan gambar 5 ke permukaan PCB dengan menggambar jalur biru dan coklat saja. Gunakan spidol permanen untuk menggambar jalur tersebut. Ikutilah petunjuk dari asisten.
Setelah jalur selesai digambar, periksa kembali jalur tersebut dan teliti ulang apakah ada jalur yang tertinggal atau berhimpit.
Bila sudah bagus, siapkan larutan ferrit klorid dengan melarutkan sejumlah kecil bubuk ferrit klorid ke dalam air. Hati-hati bila bekerja dengan menggunakan ferrit klorid karena zat ini sangat korosif dan bersifat racun. Gunakan wadah plastik untuk melarutkannya dan sebaiknya lakukan di luar ruangan.
Kemudian rendam PCB yang sudah digambar ke dalam larutan. Untuk mempercepat proses pelarutan tembaga, goyang perlahan-lahan wadah. Lakukan hingga semua tembaga yang tidak tertutup spidol larut. Proses ini disebut etching.
Setelah proses etching selesai. Angkat PCB dengan menggunakan jepitan kayu dan bersihkan pada air yang mengalir dengan menggunakan sabun. Lakukan hingga permukaan PCB benar – benar bersih dari sisa-sisa ferrit klorid.
Setelah itu bersihkan permukaan PCB dari bekas tinta spidol dengan menggunakan tinner. Kemudian gosok dengan menggunakan spon halus hingga jalur tembaga yang sudah terbentuk mengkilap dan bebas dari oksida tembaga. Perhatikan, untuk menjaga jalur tetap mengkilap, jangan sentuh jalur dengan menggunakan tangan, karena asam pada kulit akan menyebabkan jalur tembaga teroksidasi dan menjadi buram.
Buatlah titik-titik kecil dengan mengunakan paku kecil pada PAD yang akan di bor.
Setelah semua PAD ditandai dengan titik, mulailah membuat lubang dengan menggunakan bor listrik kecil ukuran 0,8 mm. Lakukan dengan hati-hati agar tidak merusak jalur tembaga.
Setelah selesai proses pengeboran, bersihkan kembali dengan menggunakan spon halus dan PCB siap untuk dipasang komponen.
Proses Penyolderan komponen
Sebelum memasang komponen ke PCB, periksa terlebih dahulu PCB yang sudah anda buat ke asisten untuk benar-benar menyakinkan PCB anda sudah benar.
Kemudian panaskan solder listrik dan tempatkan pada dudukannya.
Pasangkan komponen pada lubang PCB dengan mengikuti petunjuk gambar 5.
Solder dengan menggunakan timah kaki-kaki komponen tersebut. Perhatikan jangan menyolder terlalu lama, karena panas yang berlebih dapat merusak komponen yang digunakan. Perhatikan juga letak kaki komponen jangan sampai terbalik.
Untuk memasang IC gunakan soket IC jangan menyolder langsung kaki IC, karena komponen ini mudah rusak bila terkena panas berlebih.
Perhatikan kaki lampu LED, jangan terbalik.
Potong dan rapikan kaki komponen yang tersisa dengan menggunakan tang potong
Setelah selesai periksa kembali PCB yang sudah dipasang komponen ke asisten untuk menyakinkan pemasangan komponen sudah benar.
Bila ada komponen yang salah pasang, cabut komponen dengan menggunakan bantuan penyedot timah. Ikuti petunjuk asisten.
Proses pengawatan
Pembuatan running led ini tidak memerlukan banyak pengawatan.
Bila semua komponen sudah terpasang rapi, pasang kabel merah dan kabel hitam pada lubang power suplay, kabel merah pada lubang + dan kabel hitam pada lubang GND.
Proses pengujian
Sebelum melakukan pengujian, periksa kembali rangkaian untuk memastikan semua komponen sudah terpasang dengan benar ke asisten anda.
Siapkan adaptor yang sudah anda buat pada praktikum sebelumnya. Dan atur tegangan adaptor pada 6 volt.
Hubungkan kabel + dengan kutup + adaptor dan kabel GND dengan kutub negatif adaptor.
Hidupkan adaptor dan perhatikan nyala lampu LED, untuk mengatur kecepatan nyala lampu dapat memutar potensiometer dengan menggunakan obeng kecil.
Rangkaian ini adalah sebuah saklar cahaya. Relay akan OFF bila ada cahaya dan akan ON bila tidak ada cahaya. Rangkaian saklar cahaya ini bisa digunakan untuk membuat lampu taman atau lampu luar rumah otomatis, jadi kita tidak perlu repot-repot mematikan dan menyalakan lampu taman atau lampu luar rumah setiap pagi dan sore hari.
potensiometer1 digunakan untuk mengatur sensitivitas LDR. Berikut layout PCB untuk rangkaian di atas.
3. Rangkaian Radio FM sederhana
Sekarang radio sudah menjadi hal yang umum, hampir semua HP dilengkapi dengan FM radio. Namun tidak ada salahnya jika anda tertarik untuk membuat sendiri rangkaian FM radio sederhana. Rangkaian radio ini tidak dilengkapi dengan power amplifier sehingga untuk mendengarkan suaranya masih harus menggunakan headset. Untuk mengunakan speaker yang lebih besar, Rangkaian bisa dihubungkan ke rangkaian amplifier pada no 1.
Berikut layout PCB untuk rangkaian FM radio di atas
4. Rangkaian kunci kombinasi digital
Rangkaian ini adalah sebuah rangkaian kunci kombinasi digital sederhana. Rangkaian kunci kombinasi digital dapat dipasang pada peralatan elektronika atau pada mekanisme kunci rumah. Untuk memasang pada mekanisme kunci rumah anda dapat memodifikasinya sendiri. Kombinasi angkanya dapat diatur dengan mengubah koneksi pada konektor.
Berikut layout PCB untuk rangkaian kunci kombinasi di atas
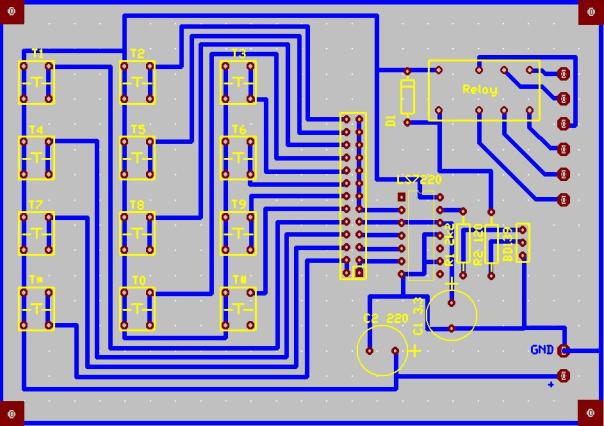
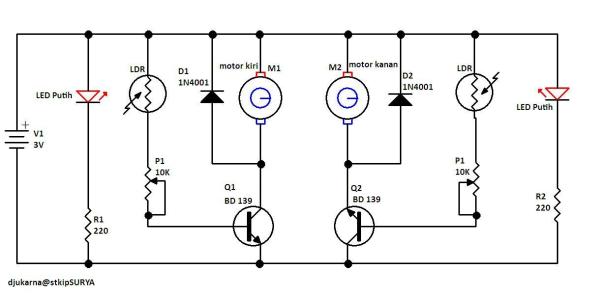
5. Rangkaian untuk robot line follower
Membuat robot line follower (dapat mengikuti garis) sangat mudah, tidak perlu menggunakan mikrokontroller. berikut ini rangkaian sederhana untuk robot line-follower.
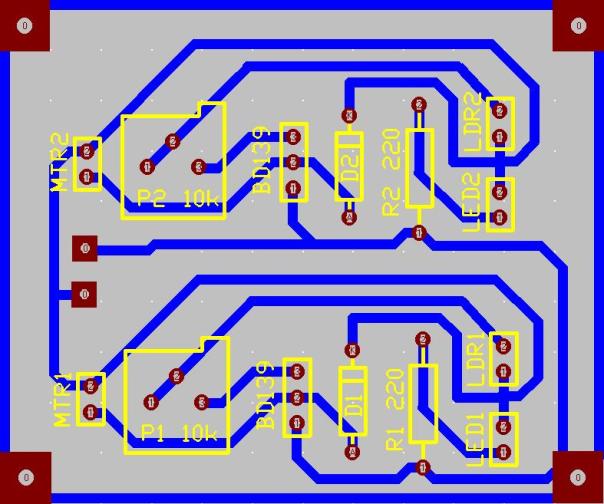
motor kiri dihubungkan ke roda kiri dan motor kanan dihubungkan ke roda kanan. Robot ini menggunakan sensor cahaya LDR dan sumber cahaya dari lampu LED putih. Potensiometer 1 dan 2 digunakan untuk mengatur sensitivitas LDR. Bentuk robotnya, silakan anda berkreasi sendiri, Untuk membuat robot sederhana yang murah dapat menggunakan motor listrik kecil milik mainan mobilan TAMIYA.
Berikut layout PCB untuk rangkaian di atas
Ok, selamat mencoba dan ditunggu koreksinya.
Ditulis dalam Elektronika
4 Komentar
Kaitkata: elektronika dasar, komponen elektronika, lampu taman, power amplifier, rangkaian amplifier, rangkaian elektronika
Praktikum membuat running LED
Apr 23
Posted by djukarna
“OK selamat bertemu kembali, berikut ini saya mau membagikan sedikit panduan praktikum elektronika dasar ” membuat running LED” yang merupakan bagian dari diktat praktikum yang sedang saya buat. Silakan bagi yang mau mencoba, memperbanyak, memperbaiki dalam bentuk hardcopy , hanya jangan dipublikasi ulang dalam bentuk softcopy atau media dunia maya lainnya.”
1. Tujuan Praktikum
Tujuan praktikum ini adalah membuat rangkaian running LED dengan menggunakan IC NE555 sebagai sumber clock dan IC logika CD4017 sebagai divide counter
2. Dasar teori
Pada praktikum ini kita akan membuat sebuah rangkaian sederhana yang bersifat dekorasi yaitu running LED 10. Rangkaian ini terdiri dari 2 bagian yaitu bagian sumber denyut (clock) dan bagian logika. Untuk membuat sumber clock kita menggunakan IC NE 555 yang sudah sangat terkenal. IC NE 555 ini akan dikonfigurasikan menjadi sebuah generator denyut yang membangkitkan gelombang kotak. Berikut rangkaian NE 555 sebagai pembangkit denyut gelombang kotak.
Gambar 1 rangkaian NE555 yang digunakan sebagai pembangkit denyut
Denyut (clock) yang keluar dari IC NE 555 dibaca oleh IC 4017. IC 4017 adalah IC counter-divider dengan 10 titik output. Setiap perubahan dari low ke high pada clock yang diberikan oleh NE 555 ke kaki clock IC 4017 akan menyebabkan IC 4017 menghitung dari satu titik output ke titik output berikutnya. Jika proses menghitung sudah sampai pada titik output terakhir (9) maka proses menghitung akan diulang dari awal. Frekuensi clock NE 555 dapat dihitung dengan rumus :
Berikut ini rangkaian CD4017 yang dihubungkan ke 10 buah LED.
Gambar 2 Rangkaian CD 4017 sebagai counter divider
Untuk output IC 4017 ini dihubungkan dengan 10 buah lampu LED. Lampu LED ini membutuhkan arus listrik maksimal 20 mA. Untuk mencegah arus yang berlebih maka sebuah resistor dengan nilai 1 kiloOhm dihubungkan ke kaki negatif LED.
R3 adalah potensiometer yang dapat digunakan untuk mengubah nilai clock, sehingga kecepatan running LED dapat diatur dengan mengubah-ngubah nilai potensiometer ini.
3. Skema dan Komponen yang dibutuhkan
Praktikum ini akan membuat sebuah running Led 10 lampu dengan menggunakan IC NE 555 sebagai clock dan CD 4017 sebagai counter divider. Berikut rangkaian elektronika yang akan dibuat.
Gambar 3 rangkaian running led 10
Komponen-komponen yang dibutuhkan adalah :
IC CD 4017 = 1 buah
IC NE 555 = 1 buah
Resistor 1kOhm = 2 buah
Resistor 4k7 = 1 buah
Capasitor 100nF = 2 buah
Capasitor 10mF/16V = 1 buah
Potensiometer 100K = 1 buah
LED 5 mm = 10 buah
PCD 8cm x 8cm = 1 lembar
Kabel = secukupnya
Soket IC 2 x 4 kaki = 1 buah
Soket IC 2 x 8 kaki = 1 buah
Alat-alat kerja yang dibutuhkan :
Solder listrik 30 Watt = 1 buah
Tang potong = 1 buah
Tang lancip = 1 buah
Tang pengupas kabel = 1 buah
Obeng + dan - = 1 set
Sedotan timah = 1 buah
Ferrid clorida = secukupnya
Wadah ferrid clorida = 1 buah
Bor pcd = 1 set
Spon gosok = 1 set
Tinner = secukupnya
Dudukan solder = 1 set
4. Cara kerja
Proses pembuatan PCB
Perhatikan skala pada gambar 5. Gambar ini belum sesuai dengan skala sebenarnya, jadi sesuaikan sendiri dengan ukuran komponen yang digunakan.
Gambar 5 layout PCB yang akan dicetak
Pindahkan gambar 5 ke permukaan PCB dengan menggambar jalur biru dan coklat saja. Gunakan spidol permanen untuk menggambar jalur tersebut. Ikutilah petunjuk dari asisten.
Setelah jalur selesai digambar, periksa kembali jalur tersebut dan teliti ulang apakah ada jalur yang tertinggal atau berhimpit.
Bila sudah bagus, siapkan larutan ferrit klorid dengan melarutkan sejumlah kecil bubuk ferrit klorid ke dalam air. Hati-hati bila bekerja dengan menggunakan ferrit klorid karena zat ini sangat korosif dan bersifat racun. Gunakan wadah plastik untuk melarutkannya dan sebaiknya lakukan di luar ruangan.
Kemudian rendam PCB yang sudah digambar ke dalam larutan. Untuk mempercepat proses pelarutan tembaga, goyang perlahan-lahan wadah. Lakukan hingga semua tembaga yang tidak tertutup spidol larut. Proses ini disebut etching.
Setelah proses etching selesai. Angkat PCB dengan menggunakan jepitan kayu dan bersihkan pada air yang mengalir dengan menggunakan sabun. Lakukan hingga permukaan PCB benar – benar bersih dari sisa-sisa ferrit klorid.
Setelah itu bersihkan permukaan PCB dari bekas tinta spidol dengan menggunakan tinner. Kemudian gosok dengan menggunakan spon halus hingga jalur tembaga yang sudah terbentuk mengkilap dan bebas dari oksida tembaga. Perhatikan, untuk menjaga jalur tetap mengkilap, jangan sentuh jalur dengan menggunakan tangan, karena asam pada kulit akan menyebabkan jalur tembaga teroksidasi dan menjadi buram.
Buatlah titik-titik kecil dengan mengunakan paku kecil pada PAD yang akan di bor.
Setelah semua PAD ditandai dengan titik, mulailah membuat lubang dengan menggunakan bor listrik kecil ukuran 0,8 mm. Lakukan dengan hati-hati agar tidak merusak jalur tembaga.
Setelah selesai proses pengeboran, bersihkan kembali dengan menggunakan spon halus dan PCB siap untuk dipasang komponen.
Proses Penyolderan komponen
Sebelum memasang komponen ke PCB, periksa terlebih dahulu PCB yang sudah anda buat ke asisten untuk benar-benar menyakinkan PCB anda sudah benar.
Kemudian panaskan solder listrik dan tempatkan pada dudukannya.
Pasangkan komponen pada lubang PCB dengan mengikuti petunjuk gambar 5.
Solder dengan menggunakan timah kaki-kaki komponen tersebut. Perhatikan jangan menyolder terlalu lama, karena panas yang berlebih dapat merusak komponen yang digunakan. Perhatikan juga letak kaki komponen jangan sampai terbalik.
Untuk memasang IC gunakan soket IC jangan menyolder langsung kaki IC, karena komponen ini mudah rusak bila terkena panas berlebih.
Perhatikan kaki lampu LED, jangan terbalik.
Potong dan rapikan kaki komponen yang tersisa dengan menggunakan tang potong
Setelah selesai periksa kembali PCB yang sudah dipasang komponen ke asisten untuk menyakinkan pemasangan komponen sudah benar.
Bila ada komponen yang salah pasang, cabut komponen dengan menggunakan bantuan penyedot timah. Ikuti petunjuk asisten.
Proses pengawatan
Pembuatan running led ini tidak memerlukan banyak pengawatan.
Bila semua komponen sudah terpasang rapi, pasang kabel merah dan kabel hitam pada lubang power suplay, kabel merah pada lubang + dan kabel hitam pada lubang GND.
Proses pengujian
Sebelum melakukan pengujian, periksa kembali rangkaian untuk memastikan semua komponen sudah terpasang dengan benar ke asisten anda.
Siapkan adaptor yang sudah anda buat pada praktikum sebelumnya. Dan atur tegangan adaptor pada 6 volt.
Hubungkan kabel + dengan kutup + adaptor dan kabel GND dengan kutub negatif adaptor.
Hidupkan adaptor dan perhatikan nyala lampu LED, untuk mengatur kecepatan nyala lampu dapat memutar potensiometer dengan menggunakan obeng kecil.


Rabu, 11 Juli 2012
Software elektronika
SoftWare elektronika
PROTEL 99+crack
Protel 99 SE + crack
- Type:
- Applications > Windows
- Files:
- 13
- Size:
- 54.44 MiB (57083074 Bytes)
- Quality:
- +0 / -0 (0)
- Uploaded:
- 2009-04-08 23:36:11 GMT
- By:
- ms19622003
- Seeders:
- 19
- Leechers:
- 2
- Comments
- 7
- Info Hash:

Software code vision AVR
 Melengkapi software buat latihan mikrokontroller secara simulasi, kali ini saya postingkan link download CodeVisionAVR + bagaimana cara menginstalnya. CodeVisionAVR adalah sebuah software untuk membuat program / Cross-Compiler C, Integrated Development Environtmen (IDE), dan Automatic Program Generator
yang didesain untuk mikrokontroller buatan Atmel seri AVR. Proses
instal yang saya postkan kali ini semoga bisa menjadi solusi buat
teman-teman dan siswa Saya yang merasa kesulitan saat ingin melakukan
proses instal soeftware CodeVisionAVR. Lebih detail tentang cara instal CodeVisionAVR dapat didownload versi PDFnya.
Melengkapi software buat latihan mikrokontroller secara simulasi, kali ini saya postingkan link download CodeVisionAVR + bagaimana cara menginstalnya. CodeVisionAVR adalah sebuah software untuk membuat program / Cross-Compiler C, Integrated Development Environtmen (IDE), dan Automatic Program Generator
yang didesain untuk mikrokontroller buatan Atmel seri AVR. Proses
instal yang saya postkan kali ini semoga bisa menjadi solusi buat
teman-teman dan siswa Saya yang merasa kesulitan saat ingin melakukan
proses instal soeftware CodeVisionAVR. Lebih detail tentang cara instal CodeVisionAVR dapat didownload versi PDFnya.
Berikut adalah langkah-langkah Instalasi CodeVisionAVR:
- Buka folder tempat kita menyimpan master software CodeVisionAVR, pilih file Setup dengan melakukan double click atau klik kanan - Run Adsministrator - OK.
- Pilih English pada jendela Select Setup Language, klik OK.
- Pada jendela Welcome to the CodeVisionAVR C Compiler Setup Wizard pilih menu Next.
- Pilih point I accept the agreement pada jendela Licence Agreement, kemudian pilih Next jika kita setuju dengan perjanjian yang diajukan pada jendela tersebut.
- Selanjutnya akan tampil jendela yang meminta password, pada kolom password silahkan copy-paste password dari file thuongvn.txt.

- Lanjutkan proses instalasi dengan memilih menu Next/Yes/OK pada jendela-jendela berikutnya.

- Proses Isntal memang seperti sudah selesai, namun software belum dapat digunakan. Pada saat CodeVisionAVR akan digunakan maka akan muncul jendela CodeVisionAVR Licence. Jendela tersebut meminta file licence.

- Langkah yang perlu kita lakukan adalah membuka file Keygen yang juga terletak pada folder tempat Kita menyimpan master CodeVisionAVR.
- Masukkan Nama Kita pada kolom Username, Nama Perusahaan Kita pada kolom Company dan masukkan serial number yang telah tertulis pada jendela CodeVisionAVR Licence:
- Kemudian pilih menu Make pada jendela KeyGen. Arahkan pada folder tempat kita menyimpan instalasi CodeVisionAVR kemudian pilih menu Save maka akan muncul jendela dengan tulisan Licence file generated! - OK.

- Selanjutnya silahkan kembali ke jendela CodeVisionAVR Licence, kemudian pilih Import dan arahkan pada folder kita menyimpan file Licence dari KeyGen pada langkah sebelumnya tadi. Pilih file Licence kemudian pilih Open:

PROTEUS PROFESSIONAL 7.5
Jangan merasa pinter Elektronika kalo belum tau software yang satu ini. Proteus Profesional 7.5 merupakan software simulator dan perancangan PCB dengan library komponen sangat lengkap. Simulator yang Saya maksud adalah software yang mampu mensimulasikan sebuah rangkaian lengkap dengan pengukuran baik analog maupun digital seperti pada Electronic Workbench.
Proteus juga dapat digunakan untuk mendesain PCB dengan baik. Fasilitas yang dimiliki dalam perancangan PCB cukup
lengkap, seperti pembuatan jalur secara otomatis mengikuti
scematic/rangkaian yang telah dibuat, dapat digunakan untuk mendesain
PCB multilayer (berlepis-lapis) sampai lebih dari 14 layer, dilengkapi
fasilitas autoruter yaitu software akan mencarikan jalur PCB secara
otomatis mengikuti schematic (rangkaian) yang telah dibuat.
Salah satu kelebihan Proteus yang paling utama adalah mampu mensimulasikan pemrograman mikrokontroller
sehingga sangat membantu kita dalam belajar mikrokontroller tanpa
harus memiliki perangkat mikrokontroller. Penggunaan Proteus sebagai
simulator pemrograman mikrokontroller harus didukung software
pemrograman seperti CodeVision AVR dan lain sebagainya.


Bagi yang sudah download master Proteus 7.5 SP3
Materi dalam posting kali ini juga tersedia cara Instal Proteus 7.5 SP3 versi PDF yang lebih lengkap-full picture dan bersifat Free Download.
Materi dalam posting kali ini juga tersedia cara Instal Proteus 7.5 SP3 versi PDF yang lebih lengkap-full picture dan bersifat Free Download.
- Silahkan buka folder tempat Anda menyimpan Master Proteus 7.5 SP3, kemudian pilih file Proteus 75SP3 Setup.
- Anda akan bertemu dengan beberapa jendela seperti pada proses instalasi software pada umumnya yaitu jendela: Preparing Setup, Konfirmasi Instalasi, Windows Standalone Installer, Welcome to InstallShield Wizard for Proteus Professional, Licence Agreement, dan Setup Type. pilih Next/OK/Yes pada jendela-jendela tersebut.

- Selanjutnya Anda akan bertemu dengan jendela Labcenter Licence Manager 1.6, pada jendela tersebut kita harus memasukkan File Licence Key. Masukkan File Licence Key dengan cara klik Browse For Key File, arahkan pada folder tempat kita menyimpan master Proteus 7.5 SP3 ® Proteus_Profesional_7.5_SP3 ® Proteus_7.5_sp3_patch_v2.1.2 ® pilih file Grassington North Yorkshire kemudian pilih Open.

- Setelah File Licence Key sudah masuk pada kolom Available Key di sebelah kiri, pilih Instal ® Yes, setelah File Licence Key masuk pada kolom Installed Key di sebelah kanan pilih Close.

- Selanjutnya Anda hanya perlu menekan tombol Next pada jendela-jendela berikut: Produck Licence Key, Choose Destination Location, Select Feature, dan Select Program Folder.

- Berikutnya Anda akan bertemu jendela Setup Status, proses instalasi dimulai. silahkan tunggu sampai selesai. Pilih Finish pada jendela InstallShield Wizard Complete.

- Proses Instal Proteus Belum selesai, silahkan buka Folder Proteus 7.5 SP3 ® Proteus_Profesional_7.5_SP3 ® Proteus_7.5_sp3_patch_v2.1.2 ® pilih file LXK Proteus 7.5 SP3 v2.1.2 dengan cara klik kanan ® Run Administrator ® OK maka akan muncul jendela Proteus 7.5 SP3 Pro Update, pilih tombol Update.

- Setelah selesai proses Update Licence Key, Software Proteus 7.5 SP3 siap digunakan.
-- SELAMAT BERKARYA --
Link :
Free Download Software Proteus 7.5 SP3 Tutorial Cara Membuat Robot Cerdas
Tutorial Cara Membuat Robot Cerdas

Tahap-tahap pembuatan robot
Secara garis besar, tahapan pembuatan robot dapat dilihat pada gambar berikut:

Ada tiga tahapan pembuatan robot, yaitu:
1. Perencanaan, meliputi: pemilihan hardware dan design.
2. Pembuatan, meliputi pembuatan mekanik, elektonik, dan program.
3. Uji coba.
.
.
.
1. Tahap perencanan
Dalam tahap ini, kita merencanakan apa yang
akan kita buat, sederhananya, kita mau membuat robot yang seperti apa?
berguna untuk apa? Hal yang perlu ditentukan dalam tahap ini adalah:
Dimensi, yaitu
panjang, lebar, tinggi, dan perkiraan berat dari robot. Robot KRI
berukuran tinggi sektar 1m atau sesuai ukuran yang telah di tentukan
dari peraturan yang ada, sedangkan tinggi robot KRCI sekitar 25 cm.
Struktur material, apakah dari alumunium, besi, kayu, plastik, dan sebagainya.
Cara kerja robot, berisi bagian-bagian robot dan fungsi dari bagian-bagian itu. Misalnya lengan, konveyor, lift, power supply,Roda Bebas.
Sensor-sensor apa yang akan dipakai robot untuk mendeteksi keberadaan benda seperti,api,balok,kayu,dan lain sebagainya.
Mekanisme, bagaimana sistem mekanik agar robot dapat menyelesaikan tugas.
Metode pengontrolan, yaitu bagaimana robot dapat dikontrol dan digerakkan, mikroprosesor yang digunakan, dan blok diagram sistem.
Strategi untuk memenangkan pertandingan, jika memang robot itu akan diikutkan lomba/kontes robot Indonesia/Internasional.
2. Tahap pembuatan
Ada tiga perkerjaan yang harus dilakukan
dalam tahap ini, yaitu pembuatan mekanik, elektronik, dan programming.
Masing-masing membutuhkan orang dengan spesialisasi yang berbeda-beda,
yaitu:
Spesialis Mekanik, bidang ilmu yang cocok adalah teknik mesin dan teknik industri.
Spesialis Elektronika, bidang ilmu yang cocok adalah teknik elektro.
Spesialis Programming, bidang ilmu yang cocok adalah teknik informatika.
Jadi dalam sebuah tim robot, harus ada
personil-personil yang memiliki kemampuan tertentu yang saling mengisi.
Hal ini diperlukan dalam membentuk Tim Kontes Robot Indonesia (KRI) atau
Kontes Robot Cerdas Indonesia (KRCI). Bidang ilmu yang saya sebutkan
tadi, tidak harus diisi mahasiswa/alumni jurusan atau program studi
tersebut, misalnya boleh saja mahasiswa jurusan teknik mesin belajar
pemrograman.
Untuk mengikuti lomba KRI/KRCI dibutuhkan
sebuah tim yang solid. Tetapi buat Anda yang tertarik membuat robot
karena hobby atau ingin belajar, semua bisa dilakukan sendiri, karena
Anda tidak terikat dengan waktu atau deadline. Jadi Anda bisa
melakukannya dengan lebih santai.tapi perlu di ingat membuat robot
membutuhkan biaya yang tidak sedikit dan itu juga tergantung dari fungsi
robot itu sendiri.
~Pembuatan mekanik
Setelah gambaran garis besar bentuk robot
dirancang, maka rangka dapat mulai dibuat. Umumnya rangka robot KRI
terbuat dari alumunium kotak atau alumunium siku. Satu ruas rangka
terhubung satu sama lain dengan keling alumunium. Keling adalah semacam
paku alumunium yang berguna untuk menempelkan lembaran logam dengan erat
biasa kita sebut dengan paku Rifett. Rangka robot KRCI lebih variatif,
bisa terbuat dari plastik atau akrelik..
~Pembuatan sistem elektronika
Bagian sistem elektronika dirancang sesuai
dengan fungsi yang diinginkan. Misalnya untuk menggerakkan motor DC
diperlukan h-brigde, sedangkan untuk menggerakkan relay diperlukan
saklar transistor. Sensor-sensor yang akan digunakan dipelajari dan
dipahami cara kerjanya, misalnya:
1. Sensor jarak, bisa menggunakan SRF04, GP2D12, atau merakit sendiri modul sensor ultrasonik atau inframerah.
2. Sensor arah, bisa menggunakan sensor kompas CMPS03 atau Dinsmore.
3. Sensor suhu, bisa menggunakan LM35 atau sensor yang lain.
4. Sensor nyala api/panas, bisa menggunakan UVTron atau Thermopile.
5. Sensor line follower / line detector, bisa menggunakan led & photo transistor.
Berikut ini gambar sensor ultrasonik, inframerah, UVTron, dan kompas:




.
Pembuatan sistem elektronika ini meliputi tiga tahap:
· Design PCB, misalnya dengan program Altium DXP.
· Pencetakan PCB, bisa dengan Proboard.
· Perakitan dan pengujian rangkaian elektronika.
~Pembuatan Software/Program

Pembuatan software dilakukan setelah alat
siap untuk diuji. Software ini ditanamkan (didownload) pada
mikrokontroler sehingga robot dapat berfungsi sesuai dengan yang
diharapkan..
Tahap pembuatan program ini meliputi:

1. Perancangan Algoritma atau alur program
Untuk fungsi yang sederhana, algoritma dapat
dibuat langsung pada saat menulis program. Untuk fungsi yang kompleks,
algoritma dibuat dengan menggunakan flow chart.
2. Penulisan Program
Penulisan program dalam Bahasa C, Assembly, Basic, atau Bahasa yang paling dikuasai.
Penulisan program dalam Bahasa C, Assembly, Basic, atau Bahasa yang paling dikuasai.
3. Compile dan download, yaitu mentransfer program yang kita tulis kepada robot.
3. Uji coba
Setelah kita mendownload program ke
mikrokontroler (otak robot) berarti kita siap melakukan tahapan terakhir
dalam membuat robot, yaitu uji coba. Untuk KRCI, ujicoba dilakukan pada
arena seluas sekitar 4×4 meter dan berbentuk seperti puzzle. Dalam
arena KRCI ini diletakkan lilin-lilin yang harus dipadamkan oleh robot
cerdas pemadam api. Contoh gambar robot pemadam api Ted Larsorn dan
arena Kontes Robot Cerdas Indonesia (KRCI).
Gambar Robot KRI
 .
.
.
.
.
.
.
.
Gambar Robot KRCI Beroda
 .
.
.
.
.
.
.
.
Gambar Robot KRCI Berkaki

.
.
.
.
.
.
Mudah Mudahan Dengan adanya Tutorial Cara Membuat Robot Cerdas ini bisa bermanfaat buat anda di bidang Robotik.
charcher schema
CHARGER CIRCUIT
 |
| Battery Charger 1.5 Volt 9 Volt dan |
Rangkaian Line Follower ROBOT Berbasis AT89C2051
Rangkaian Line Follower ROBOT Berbasis AT89C2051
 Line Follower ROBOT dirancang yang menggunakan dua motor kontrol roda
belakang dan roda depan tunggal bebas. Ini memiliki sensor 4-inframerah
pada bagian bawah untuk mendeteksi pita hitam pelacakan, ketika sensor
mendeteksi warna hitam, output dari komparator, LM324 adalah logika
rendah dan yang lainnya output tinggi.
Gambar Robot Line Follower
robot
.
Line Follower ROBOT dirancang yang menggunakan dua motor kontrol roda
belakang dan roda depan tunggal bebas. Ini memiliki sensor 4-inframerah
pada bagian bawah untuk mendeteksi pita hitam pelacakan, ketika sensor
mendeteksi warna hitam, output dari komparator, LM324 adalah logika
rendah dan yang lainnya output tinggi.
Gambar Robot Line Follower
robot
.

 .
.
.
.
.
.
.Rangkaian Line Follower
rangkiaan-robot
.
.
.
.
.
.
.
.
.Mikrokontroler AT89C2051 dan-Bridge driver L293D H digunakan untuk
mengontrol arah dan kecepatan motor.
sensor
.
.
.
.
.Gambar Posisi sensor robot, sisi kiri adalah sisi tampilan dan sisi
kanan adalah pandangan atas.
sensor-21
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Skema rangkaian Infrared sensors and comparators
Software/program
Untuk Software AT89C2051 bisa lihat di Sini robot1.hex , yang ditulis
oleh C-bahasa, kode sumber robot1.c disusun dengan menggunakanMC51 dalam
model kecil dengan awal saya up coderobot.asm.
.
.
.
.
.
.
.Rangkaian Line Follower
rangkiaan-robot
.
.
.
.
.
.
.
.
.Mikrokontroler AT89C2051 dan-Bridge driver L293D H digunakan untuk
mengontrol arah dan kecepatan motor.
sensor
.
.
.
.
.Gambar Posisi sensor robot, sisi kiri adalah sisi tampilan dan sisi
kanan adalah pandangan atas.
sensor-21
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Skema rangkaian Infrared sensors and comparators
Software/program
Untuk Software AT89C2051 bisa lihat di Sini robot1.hex , yang ditulis
oleh C-bahasa, kode sumber robot1.c disusun dengan menggunakanMC51 dalam
model kecil dengan awal saya up coderobot.asm.

Langganan:
Komentar (Atom)